




Категория: Инструкции
Язык Список команд (Instruction List ) – это унификация интерфейса языка программирования низкого уровня, неориентированного на какую-либо микропроцессорную архитектуру. Происхождение базовых конструкций языка – STEP 5 (Siemens ). У языка IL есть очень важное качество: на его основе можно создавать оптимальные по быстродействию программные единицы.
Программа, написанная на языке IL. состоит из набора инструкций, выполняемых ПЛК последовательно (рис 4.3). Каждая инструкция состоит из кода инструкций и операнда.
Например: LD %I 1.0, где LD – код инструкции, I 1.0 – операнд.
- Стандартные системные управляющие функции (таймеры, счетчики).
- Арифметические и логические операции и операции пересылки.
- Внутренние переменные ПЛК.
Существуют два типа инструкций:
- Проверочные инструкции, которые содержат условия, необходимые для того, чтобы выполнилось действие, например, LD. AND. OR .
- Инструкции действия, которые активизируют действие, следующее за проверочной последовательностью, например, ST. STN. R .

Рис. 4.3. Фрагмент программы на языке IL
Список базовых инструкций языка IL приведен в таблице 4.6.
Таблица 4.6. Базовые инструкции языка IL
Комментарий может быть расположен в начале последовательности инструкций. Он может занимать до 3-х строк (т.е. 222 алфавитно-цифровых символов) и должен быть обрамлен символами (*и*). На мониторе воспроизводится только первая строка комментария. Если последовательность удаляется, то удаляется также связанный с ней комментарий.
Метка может быть назначена один раз для единственной последовательности инструкций в данном программном объекте. Для обеспечения соответствующих связей при программном переходе последовательность должна быть помечена.
Система сканирует последовательность инструкций в том порядке, как они были введены независимо от значений чисел, используемых при формировании меток.
Круглые скобки могут быть использованы в инструкциях AND и OR. Действие скобок наглядно демонстрируется при сопоставлении с соответствующими Лестничными Диаграммами. Открывающаяся круглая скобка связана с соответствующей инструкцией AND или OR. Закрывающаяся круглая скобка является инструкцией и обязательна для каждой открытой скобки.
Для круглых скобок допускается до восьми уровней вложения. При их применении следует соблюдать следующие правила:
- За каждой открывающей круглой скобкой должна последовать закрывающая скобка.
- Метки не должны располагаться в выражении между круглыми скобками. Это правило справедливо также для инструкций перехода и вызова подпрограмм.
- Инструкции обозначенные – ST. STN. S и R не могут быть запрограммированы между круглыми скобками.
Существуют три типа инструкций, которые используются для обработки содержимого ячеек в особом порядке. Они используют буфер в виде стека, который способен запоминать вплоть до трех битов булевских данных.
- Инструкция MPS (Memory PuSh ) запоминает на вершине стека последний результат проверочной инструкции и сдвигает другие данные в направлении дна стека.
- Инструкция MRD (Memory ReaD) считывает содержимое вершины стека.
- Инструкция МРР (Memory PoP) считывает вершину стека и сдвигает другие данные в нем в направлении вершины стека.
Эти инструкции не используются в выражениях между круглыми скобками.
Программы списка команд выполняются последовательно – инструкция за инструкцией.
Первой инструкцией обязательно должна быть либо LD. либо инструкция безусловного перехода (JMP ). Все инструкции (за исключением LD и JMP ) используют булевский результат предыдущей инструкции.














Языки программирования контроллера РСУ.
Главная задача ПЛК – это выполнение прикладной программы управления технологическим процессом. Очевидно, что незапрограммированный контроллер – это всего лишь пустая железяка, не приносящая никакой пользы человечеству.
Какие программы может выполнять промышленный контроллер? Ответ прост: практически любые. Современный контроллер свободно программируем, т.е. предоставляет разработчику возможность создавать пользовательские программы произвольной структуры без ограничений их функциональности, будь то программа управления пастеризатором на молочном комбинате или управление колонной ректификации на НПЗ. По сути, единственным ограничением здесь может быть объем свободных ресурсов контроллера.
Что нужно, чтобы запрограммировать ПЛК? Грамотный специалист. Во-вторых, персональный компьютер или портативный программатор, подключенный к контроллеру по сети. В-третьих, программный пакет разработки, поставляемый, как правило, за дополнительную плату. Иногда среда разработки входит в состав комплексного ПО для инсталляции и эксплуатации всей системы управления.
Современные средства разработки чрезвычайно функциональны и предлагают разработчику множество возможностей:
1. Разнообразные программные библиотеки, функциональные блоки, готовые процедуры и шаблоны. Использование предподготовленных компонентов сильно ускоряет процесс разработки программного обеспечения для ПЛК.
2. Инструменты для отладки, тестирования и симуляции прикладной программы. Последние позволяют выполнять программу ПЛК на персональном компьютере без загрузки в реальный контроллер.
3. Инструменты для автоматизированного документирования разработанной программы в соответствие с принятыми стандартами.
Но у программиста есть и более мощный инструмент. Дело в том, что современные средства разработки прикладного ПО для промышленных контроллеров, как правило, поддерживают до шести разных языков программирования.
Существует международный стандарт IEC 61131, разработанный Международной Электротехнической Комиссией (МЭК, IEC) и состоящий из восьми частей. Наиболее интересной является третья часть, IEC 61131-3, описывающая языки программирования ПЛК. Первоначальной целью стандарта IEC 61131-3 была унификация языков программирования ПЛК и предоставление разработчикам ряда аппаратно-независимых языков, что, по замыслу создателей стандарта, обеспечило бы простую переносимость программ между различными аппаратными платформами и снимало бы необходимость изучения новых языков и средств программирования при переходе разработчика на новый ПЛК.
К сожалению, цели в полном объеме достигнуты не были. Каждый производитель ПЛК сопровождает свой продукт собственной средой программирования, которая, как правило, не совместима с другими, да и о кросс-платформенности программного кода можно забыть. Тем не менее, в части описания языков программирования стандарт IEC 61131 остается чрезвычайно актуальным и является ориентиром для большинства разработчиков ПЛК.
Какие языки используются для программирования промышленных контроллеров? Ниже приведен краткий обзор языков стандарта.
Язык LD (LAD, Ladder) является графическим языком разработки, программа на котором представляет собой аналог релейной схемы. Пример программы на данном языке приведен на рис. 1. По идеи авторов стандарта, такая форма представления программы облегчит переход инженеров из области релейной автоматики на ПЛК.
К недостаткам данного языка можно отнести то, что по мере увеличения количества «реле» в схеме она становится сложнее для интерпретации, анализа и откладки. Еще один недостаток языка LD заключается в следующем: язык, построенный по аналогии с релейными схемами, может быть эффективно использован только для описания процессов, имеющих дискретный (двоичный) характер; для обработки «непрерывных» процессов (с множеством аналоговых переменных) такой подход теряет смысл.
Рис. 1. Язык релейных диаграмм LD.
Язык FBD (Functional Block Diagram, Диаграмма Функциональных Блоков) является языком графического программирования, так же, как и LD, использующий аналогию с электрической (электронной) схемой. Программа на языке FBD представляет собой совокупность функциональных блоков (functional flocks, FBs), входа и выхода которых соединены линиями связи (connections). Эти связи, соединяющие выхода одних блоков с входами других, являются по сути дела переменными программы и служат для пересылки данных между блоками. Каждый блок представляет собой математическую операцию (сложение, умножение, триггер, логическое “или” и т.д.) и может иметь, в общем случае, произвольное количество входов и выходов. Начальные значения переменных задаются с помощью специальных блоков – входов или констант, выходные цепи могут быть связаны либо с физическими выходами контроллера, либо с глобальными переменными программы. Пример фрагмента программы на языке FBD приведен на рис. 2.
Практика показывает, что FBD является наиболее распространенным языком стандарта IEC. Графическая форма представления алгоритма, простота в использовании, повторное использование функциональных диаграмм и библиотеки функциональных блоков делают язык FBD незаменимым при разработке программного обеспечения ПЛК. Вместе с тем, нельзя не заметить и некоторые недостатки FBD. Хотя FBD обеспечивает легкое представление функций обработки как «непрерывных» сигналов, в частности, функций регулирования, так и логических функций, в нем неудобным и неочевидным образом реализуются те участки программы, которые было бы удобно представить в виде конечного автомата.
Рис.2. Функциональная схема FBD .
Язык последовательных функциональных схем SFC (Sequential F unction Chart), использующийся совместно с другими языками (обычно с ST и IL), является графическим языком, в котором программа описывается в виде схематической последовательности шагов, объединенных переходами. Язык SFC построен по принципу, близкому к концепции конечного автомата, что делает его одним из самых мощных языков программирования стандарта IEC 61131-3. Пример программы на языке SFC приведен на рис. 3.
Наиболее простым и естественным образом на языке SFC описываются технологические процессы, состоящие из последовательно выполняемых шагов, с возможностью описания нескольких параллельно выполняющихся процессов, для чего в языке имеются специальные символы разветвления и слияния потоков (дивергенции и конвергенции, в терминах стандарта IEC 61131-3).
Шаги последовательности располагаются вертикально сверху вниз. На каждом шаге выполняется определенный перечень действий (операций). При этом для описания самой операции используются другие языки программирования, такие как IL или ST.
Действия (операции) в шагах имеют специальные классификаторы, определяющие способ их выполнения внутри шага: циклическое выполнение, однократное выполнение, однократное выполнение при входе в шаг и т.д. В сумме таких классификаторов насчитывается девять, причем среди них есть, например, классификаторы так называемых сохраняемых и отложенных действий, заставляющие действие выполняться даже после выхода программы из шага.
После того, как шаг выполнен, управление передается следующему за ним шагу. Переход между шагами может быть условным и безусловным. Условный переход требует выполнение определенного логического условия для передачи управления на следующий шаг; пока это условие не выполнено программа будет оставаться внутри текущего шага, даже если все операции внутри шага уже выполнены. Безусловный переход происходит всегда после полного выполнения всех операций на данном шаге. С помощью переходов можно осуществлять разделение и слияние ветвей последовательности, организовать параллельную обработку нескольких ветвей или заставить одну выполненную ветвь ждать завершения другой.
Как и любому другому языку, SFC свойственны некоторые недостатки. Хотя SFC может быть использован для моделирования конечных автоматов, его программная модель не совсем удобна для этого. Это связано с тем, что текущее состояние программы определяется не переменной состояния, а набором флагов активности каждого шага, в связи с чем при недостаточном контроле со стороны программиста могут оказаться одновременно активными несколько шагов, не находящихся в параллельных потоках.
Еще одно неудобство языка связано с тем, что шаги графически располагаются сверху вниз, и переход, идущий в обратном направлении, изображается в неявной форме, в виде стрелки с номером состояния, в которое осуществляется переход.
Рис. 3. Язык последовательных функциональных схем SFC.
Язык ST (Structured Text, Структурированный Текст) представляет собой язык высокого уровня, имеющий черты языков Pascal и Basic. Данный язык имеет те же недостатки, что и IL, однако они выражены в меньшей степени. Пример программы на языке ST приведен на рис. 4.
С помощью ST можно легко реализовывать арифметические и логические операции (в том числе, побитовые), безусловные и условные переходы, циклические вычисления; возможно использование как библиотечных, так и пользовательских функций. Язык также интерпретирует более 16 типов данных.
Язык ST может быть освоен технологом за короткий срок, однако текстовая форма представления программ служит сдерживающим фактором при разработке сложных систем, так как не дает наглядного представления ни о структуре программы, ни о происходящих в ней процессах.
Рис. 4. Язык структурированного текста ST.
Язык IL (Instruction List, Список Команд) представляет собой ассемблероподобный язык, достаточно несложный по замыслу авторов стандарта, для его практического применения в задачах промышленной автоматизации пользователем, не имеющим, с одной стороны, профессиональной подготовки в области программирования, с другой стороны, являющимся специалистом в той или иной области производства. Однако, как показывает практика, такой подход себя не оправдывает.
Ввиду своей ненаглядности, IL практически не используется для программирования комплексных алгоритмов автоматизированного управления, но часто применяется для кодирования отдельных функциональных блоков, из которых впоследствии складываются схемы FBD или CFC. При этом IL позволяет достичь высокой оптимальности кода: программные блоки, написанные на IL, имеют высокую скорость исполнения и наименее требовательны к ресурсам контроллера.
Язык IL имеет все недостатки, которые присущи другим низкоуровневым языкам программирования: сложность и высокую трудоемкость программирования, трудность модификации написанных на нем программ, малую степень «видимого» соответствия исходного текста программы и решаемой задачи.
Пример программы на языке IL приведен на рис. 5.
Рис. 5. Язык инструкций IL.
Многие производители инструментальных средств, опирающиеся на стандарт IEC, не ограничиваются поддержкой рассмотренных выше пяти языков стандарта. Можно выделить, как минимум, еще один язык визуального программирования, который довольно популярен среди разработчиков.
Язык CFC (Continuous Flow Chart) – еще один высокоуровневый язык визуального программирования. По сути, CFC – это дальнейшее развития языка FBD. Этот язык был специально создан для проектирования систем управления непрерывными технологическими процессами.
Проектирование сводится к выбору из библиотек готовых функциональных блоков, их позиционированию на экране, установке соединений между их входами и выходами, а также настройке параметров выбранных блоков. В отличие от FBD, функциональные блоки языка CFC выполняют не только простые математические операции, а ориентированы на управление целыми технологическими единицами. Так в типовой библиотеке CFC блоков находятся комплексные функциональные блоки, реализующие управление клапанами, моторами, насосами; блоки, генерирующие аварийные сигнализации; блоки PID-регулирования и т.д. Вместе с тем доступны и стандартные блоки FBD. Унаследовав от FBD саму концепцию программирования, язык CFC в наибольшей степени ориентирован на сам технологический процесс, позволяя разработчику абстрагироваться от сложного математического аппарата.
Рис. 6. Среда проектирования на языке CFC системы Simatic PCS7.
CFC прост в освоении, и при этом позволяет разрабатывать сложнейшие алгоритмы автоматизированного управления без каких-либо специфических знаний других языков программирования.
25 Февраль 2011
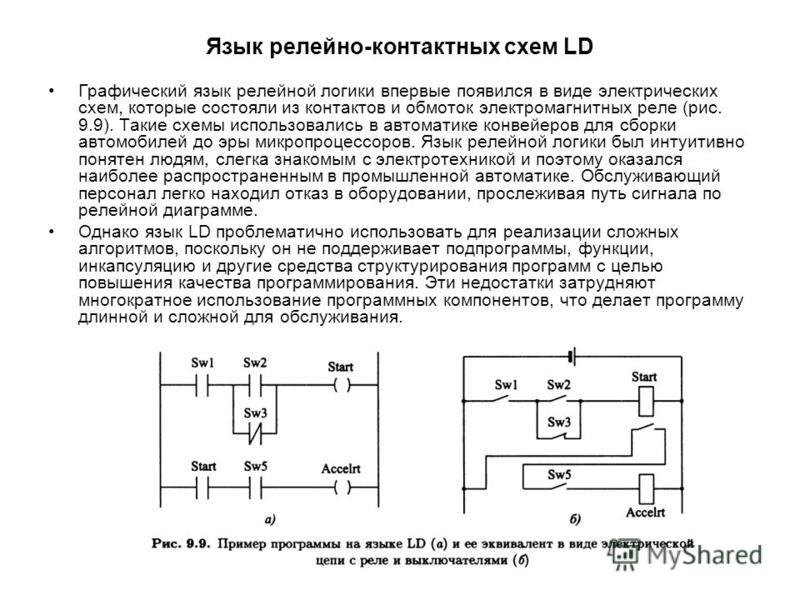
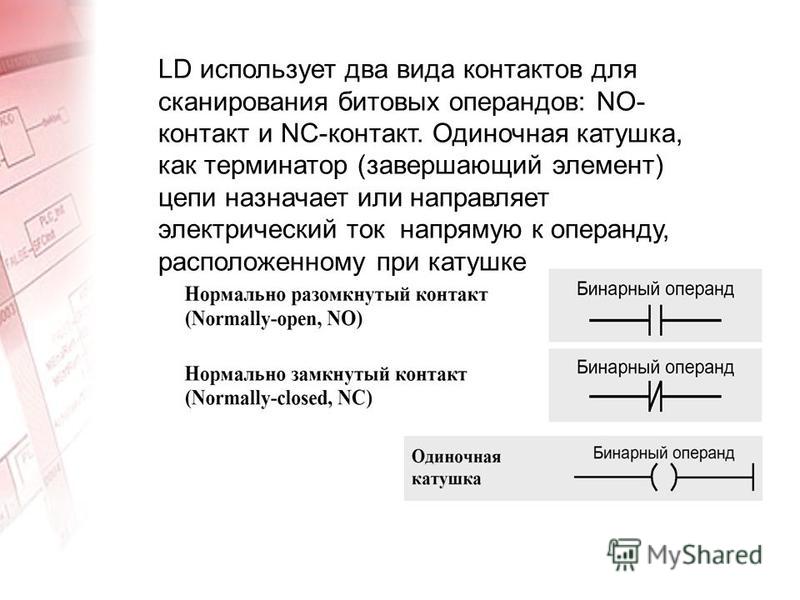
Язык релейных или релейно-контактных схем (РКС) – графический язык, реализующий структуры электрических цепей. Лучше всего LD подходит для построения логических переключателей, но достаточно легко можно создавать и сложные цепи — как в FBD. Кроме того, LD достаточно удобен для управления другими компонентами POU.
Диаграмма LD состоит из ряда цепей.
Слева и справа схема ограничена вертикальными линиями — шинами питания. Между ними расположены цепи, образованные контактами и обмотками реле, по аналогии с обычными электронными цепями. Слева любая цепь начинается набором контактов, которые посылают слева направо состояние «ON» или «OFF», соответствующие логическим значениям ИСТИНА или ЛОЖЬ. Каждому контакту соответствует логическая переменная. Если переменная имеет значение ИСТИНА, то состояние передается через контакт. Иначе правое соединение получает значение выключено («OFF»).

Пример релейной диаграммы
Контакты обозначаются двумя параллельными линиями и могут иметь состояния «ON» или «OFF». Эти состояния соответствуют значениям ИСТИНА или ЛОЖЬ. Каждому контакту соответствует логическая переменная. Если значение переменной ИСТИНА, то контакт замкнут. Контакты могут быть соединены параллельно, тогда соединение передает состояние «ON», когда хотя бы одна из ветвей передает «ON».Если контакты соединены последовательно, то для того, чтобы соединение передало «ON», необходимо, чтобы оба контакта передавали «ON». Это соответствует электрической параллельной и последовательной схеме. Контакт может быть инвертируемым. Такой контакт обозначается с помощью символа |/| и передает состояние «ON», если значение переменной ЛОЖЬ.
В правой части схемы может находиться любое количество обмоток (реле), которые обозначаются круглыми скобками (). Они могут соединяться только параллельно. Обмотка передает значение соединения слева направо и копирует его в соответствующую логическую переменную. В целом цепь может быть либо замкнутой (ON), либо разомкнутой (OFF). Это как раз и отражается на обмотке и соответственно на логической переменной обмотки (ИСТИНА/ЛОЖЬ). Обмотки также могут быть инверсными (в примере — %QX3.0). Если обмотка инверсная (обозначается символом (/) ), тогда в соответствующую логическую переменную копируется инверсное значение.
Функциональные блоки в LD
Кроме контактов и обмоток, в LD можно использовать функциональные блоки и программы. Они должны иметь логические вход и выход и могут использоваться так же, как контакты.
SET и RESET обмотка
Обмотки могут быть с «самофиксацией» типов SET и RESET. Обмотки типа SET обозначаются буквой «S» внутри круглых скобок (S). Если соответствующая этой обмотке переменная принимает значение ИСТИНА, то она навсегда (до сброса R) сохраняет его. Обмотки типа RESET обозначаются буквой R. Если соответствующая переменная принимает значение ЛОЖЬ, то она навсегда (до установки S) сохраняет его.
Весьма вероятно, что при работе с LD вы захотите с помощью контакта управлять другими POU. Во-первых, можно использовать обмотку для передачи значения глобальной переменной, которая будет использоваться в другом месте. Кроме того, можно вставить вызов прямо в схему LD. Такой POU может быть оператором, функцией, программой или функциональным блоком, который имеет добавочный вход, обозначаемый EN. Вход EN всегда логического типа, и POU выполняется, только когда значение EN=ИСТИНА. POU встраивается в схему параллельно обмоткам, и вход EN соединяется ответвлением. Использование таких POU делает LD схему похожей на FBD схему.

Функциональный блок на языке LD
Мой блог находят по следующим фразам
Как и было описано, в первой статье, ПЛК осуществляет циклическое чтение входов, выполнение прикладной программы и запись выходов. Потому написание программы для ПЛК отличается от традиционного написания программы для микроконтроллеров и ПК. К программам для ПЛК предъявляются жесткие требования по надежности, одно дело зависает текстовый редактор, а другое дело программа, управляющая ядерным реактором. Другое не менее важное требование – это своевременное реагирование на событие. А что значит, во время не прореагировать на событие в промышленности? Это значит потерять контроль над технологическим процессом. Что в некоторых случаях, примером с реактором, приведет к непоправимым последствиям.
Рассмотрим отличия написания программы для ПЛК и микроконтроллера. Для примера возьмем простейшую задачку для МК - мигающий светодиод. Подозреваю, что все начинали знакомство с МК именно с этой задачи. Алгоритм будет следующим
По данному алгоритму программа на ПЛК работать не будет, она содержит бесконечный цикл. А в ПЛК вся прикладная программа выполняется от начала до конца в каждом рабочем цикле, и любая программа должна отдавать управление системной программе. Поэтому при такой организации алгоритма наш ПЛК зависнет. Даже если и убрать, переход по метке на начало, программа не будет работать, так как нам хочется. Порт всегда будет в состоянии лог.0, так как физическая установка выходов производиться только после выполнения всей прикладной программы. И поэтому промежуточные состояния это всего лишь программные переменные в памяти, и на аппаратной части она ни как не отображаются.
В дополнение задержку времени тоже хорошо бы организовать с помощью таймера, периодически проверяя его значение, а не ожидать в пустую пока это время пройдет, наверняка для контроллера найдется другая более важная работа.
С учетом выше сказанного, правильный алгоритм будет выглядеть следующим образом:
1. Проверить таймер, если время паузы вышло, то
а) инвертировать выход
б) начать новый отсчет
2. Конец программы
Реализуем данный алгоритм на практике ниже, а теперь рассмотрим основные особенности LAD (Ladder Diagram) языка.
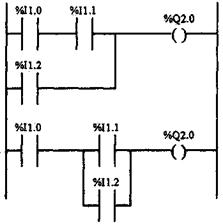
Релейная схема представляет собой две вертикальные шины, между ними расположены горизонтальные цепи образованные контактами и обмотками реле. Пример на рисунке:
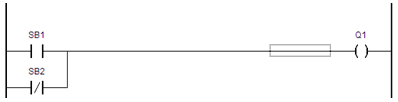
Количество контактов цепи может быть разным, а обмотка одна.
Любому контакту ставится в соответствие логическая переменная, определяющая его состояние. Если нормально замкнутый контакт замкнут, то ИСТИНА, если размокнут – Ложь, для инверсного наоборот, он замкнут когда переменная имеет значение ЛОЖЬ. Имя переменной пишется над контактом и служит его названием.
Последовательно соединенные контакты равносильны логической операции И, а параллельно-монтажное ИЛИ. Инверсный контакт равносилен операции НЕ. Параллельное соединение обмоток допускается, а последовательное нет. Обмотка реле также может быть инверсной, тогда она копирует в соответствующую логическую переменную инверсное состояние цепи.
Идея релейных схем, такова, что все цепи работают параллельно, т.е. ток во все цепи подается одновременно. Но мы знаем, что программу процессор выполняет последовательно, и мы не можем это сделать одновременно. Так и в LAD программа выполняется последовательно слева направо, сверху вниз. Но цикл процессора мал, поэтому и получается эффект параллельности.
Любая переменная в рамках одной цепи имеет одно и то же значение. Если даже реле в цепи изменит переменную, то новое значение поступит на контакты только в следующем цикле. Цепи расположенные выше получают новое значение переменной сразу, а цепи расположенные ниже – только в следующем цикле. Строгий порядок выполнения очень важен, и благодаря ним LAD- диаграмма сохраняет устойчивость при наличии обратных связей.
Хоть это и противоречит аналогии LAD с релейными схемами, порядок выполнения LAD- программы можно нарушить с помощью меток и переходов. Это ухудшает читаемость программе, и в них бывает сложно разобраться, но как говориться если очень хочется, то можно. Для этого желательно разбить программу на модули, и делать переходы между модулями.
Возможности LAD программы можно расширить, вставляя функциональные блоки. Вставлять можно все стандартные функциональные блоки, которые содержаться в МЭК. Описание для функциональных блоков можно найти в справке.
Давайте составим нашу первую программу на LAD в среде CoDeSys. CoDeSys можно скачать в интернете. достаточно воспользоваться поисковиком
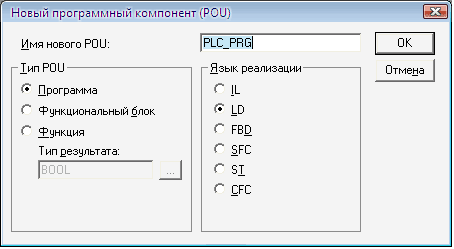
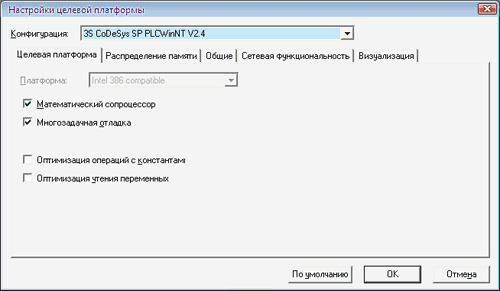
После установки, выбираем создать новый проект, и CoDeSys попросит выбрать целевую платформу для ПЛК. Указание целевой платформы необходимо, чтобы среда знала, для какого типа контроллера пишется программа. Выбираем 3S CodeSyS Sp PLCWinNT V2.4 и жмем OK.
Имя проекта оставляем по умолчанию, язык выбираем LD
Интерфейс программы на русском языке, и интуитивно понятен. При наведении на элемент всплывает имя. Советую рассмотреть все элементы, а также пункты главного меню.
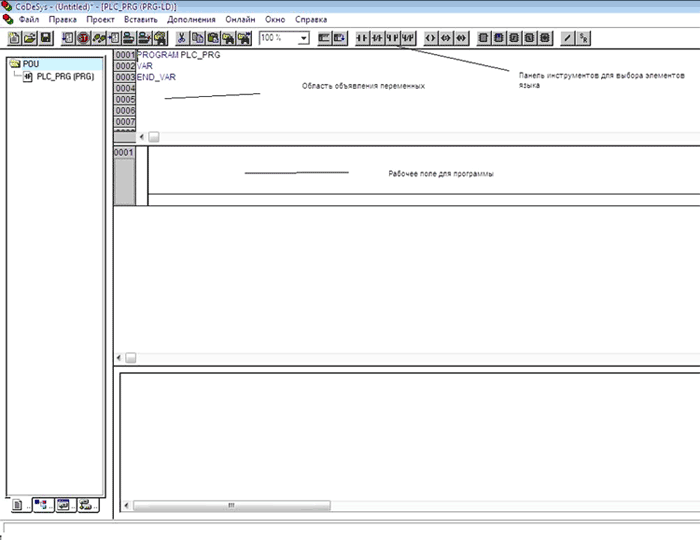
Для добавления элемента в программу необходимо левой кнопкой мыши кликнуть в рабочее поле программы и потом ЛКМ кликнуть на элемент, который вы хотите поместить в программу. Например, нормально разомкнутый контакт, у вас должно получиться следующее.

Вместо вопросительных знаков пишем имя нашей переменной, например SB, и нажимаем Enter, выходит окно объявление переменной, выбираем Bool и нажимаем OК.
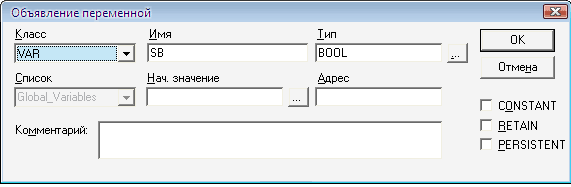
Рассмотрите, какие типы можно выбрать, а также какие классы переменных.
Давайте, реализуем программы для мигания светодиодом, а если говорить в общем, то программа для генератора одиночных импульсов
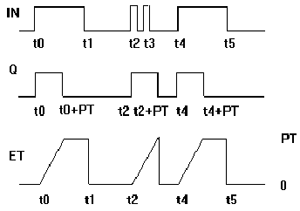
Для реализации программы используем функциональные блок таймер TP. Таймер TP – этой таймер одиночного импульса с заданной по входу PT длительностью.
Пока IN равен FALSE, выход Q = FALSE, выход ET = 0. При переходе IN в TRUE выход Q устанавливается в TRUE и таймер начинает отсчет времени на выходе ET до достижения длительности, заданной PT. Далее счетчик не увеличивается. Таким образом, выход Q генерирует импульс длительностью PT по фронту входа IN.
Временная диаграмма работы TP:
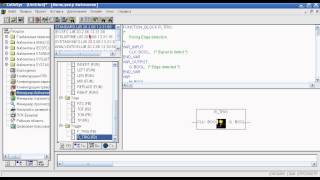
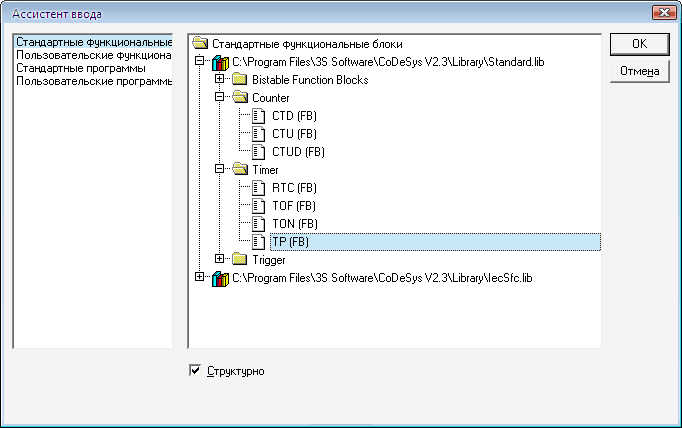
Для вставки TP, на панели элементов выбираем:

И у нас всплывает ассистент выбора функционального блока.
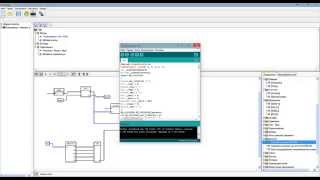
Скачайте файл проекта, и давайте рассмотрим как он работает.
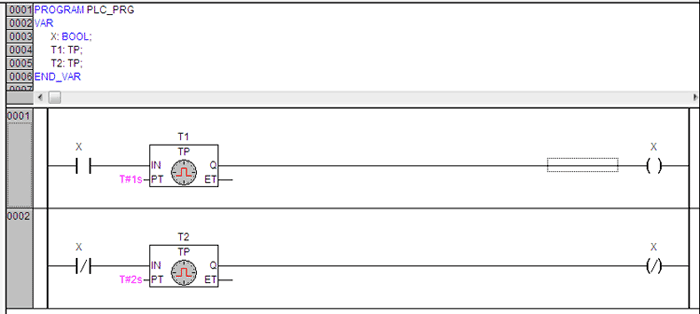
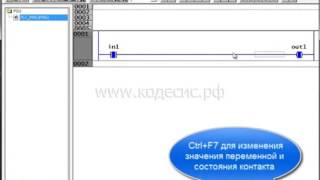
В начальный момент X= False. поэтому инверсный контакт X замкнут и таймер T2 запущен, выход Q= True, поэтому цепь включена. А так как обмотка в цепи инверсная, значит она копирует инверсное состояние цепи в X. и X остается False, после переполнения таймера Q = False. и инверсная обмотка переводит X в True. После этого запускается T1, после переполнения скидывает X в False и все повторяется. Переменная X является выходом генератора. Таймер T2 устанавливает паузу, а T1 длительность импульса.
Компилируем проект Проект -> Компилировать
В пункте онлайн выбираем Режим эмуляции. а затем Подключение и Старт. И видим, наша схема начинает переключаться, цепь где «протекает ток» выделяется синим цветом. Также в области объявления переменных видим текущее значение переменных.
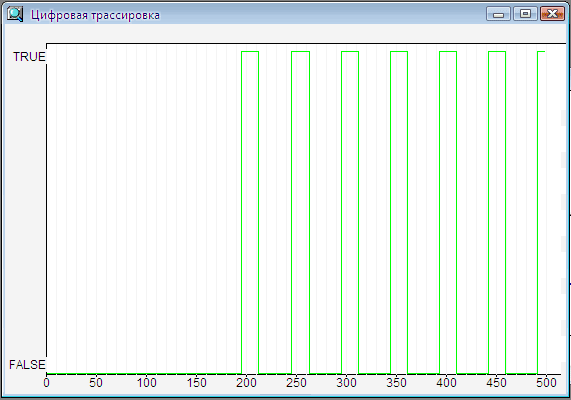
Выход генератора можно поглядеть с помощью цифрового трассировщика, для этого переходим на вкладку Ресурсы в нижнем левом углу
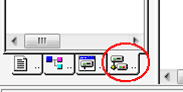
Выбираем Цифровой трассировщик -> Дополнение -> Настройка трассировки. выйдет следующее окно
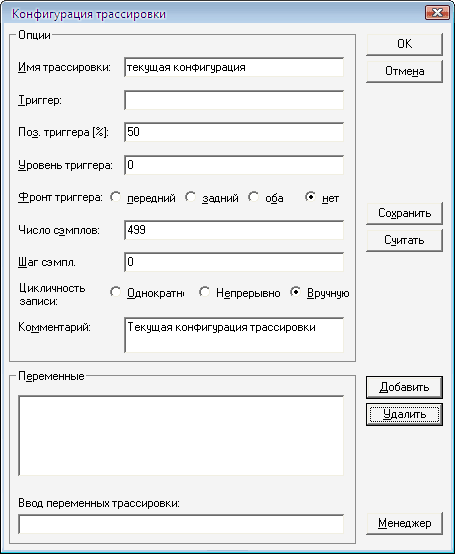
Цикличность записи поставим Вручную. нажимаем на менеджер и выбираем переменные X(Bool)
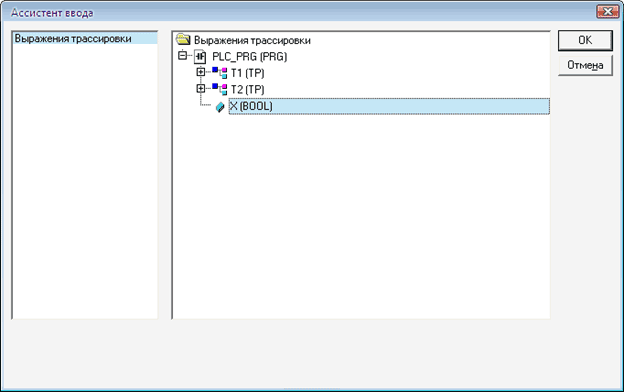
Нажимаем Ok. Выбираем перо для нашей переменной
Выбираем в онлайн Подключение, нажимаем Старт , далее Дополнительно -> Начать трассировку, также выберите пункт Автоматическая трассировка
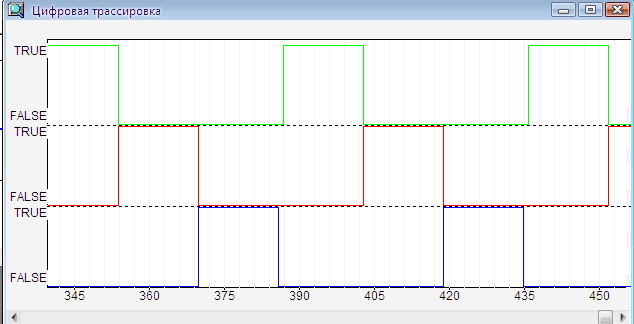
Рассмотрим еще один пример управление двигателем с электронной коммутацией обмоток статора
Саму программу представлять не буду, скачайте проект. А об алгоритме работы расскажу.
Все таймеры запускаются по сигналу старт. Каждый таймер отмеряет момент окончания фазы. Переменные Y1-Y3 являются выводами соответствующей фазы управления. Каждый выход включается в том случае, если таймер еще не переполнен и выключен предыдущий выход. Последняя цепь, является цепью автоматического перезапуска.

mr_smit 07.06.2012 12:04 #
Зачем и замкнутый и разомкнутый контакты в примере маркировать Х. Чтобы сильнее запутать?
А это вообще тихий ужас новичка (из-за Икса!):
В начальный момент X= False. поэтому инверсный контакт X замкнут и таймер T2 запущен, выход Q= True, поэтому цепь включена. А так как обмотка в цепи инверсная, значит она копирует инверсное состояние цепи в X. и X остается False, после переполнения таймера Q = False. и инверсная обмотка переводит X в True. После этого запускается T1, после переполнения скидывает X в False и все повторяется. Переменная X является выходом генератора. Таймер T2 устанавливает паузу, а T1 длительность импульса.
Иван 06.02.2013 20:08 #
Дружище, это не два разных контакта (X), а один и тот же, вот почему по-одинаковому маркируются
Новичёк 23.10.2015 20:47 #
Это не имеет смысла. Не должно ли быть как исправлено ниже?
Любая переменная в рамках одной цепи->ЦИКЛА имеет одно и то же значение. Если даже реле в цепи изменит переменную, то новое значение поступит на контакты только в следующем цикле.
И это. Где ВЫШЕ где НИЖЕ?
Цепи расположенные выше получает новое значение переменной сразу, а цепи расположенные выше – только в следующем цикле. Строгий порядок выполнения очень важен, и благодаря ним LAD- диаграмма сохраняет устойчивость при наличии обратных связей.
Илья 23.11.2012 02:17 #
Вот вроде все понятно и просто. Но понятно, что у нас есть переменная, которая меняется, а как это переменная в порт попадает? Где связывает переменную с реальном портом или пин если это bool?
Павел 23.09.2015 08:03 #
Это невозможно читать.
Любому контакту ставится в соответствие логическая переменная, определяющая его состояние. Если нормально замкнутый контакт замкнут, то ИСТИНА, если размокнут – Ложь, для инверсного наоборот, он замкнут когда переменная имеет значение ЛОЖЬ.
Если даже реле в цепи изменит переменную, то новое значение поступит на контакты только в следующем цикле. Цепи расположенные выше получает новое значение переменной сразу, а цепи расположенные выше – только в следующем цикле.

Конструктор - Гитарная педаль Remote Delay 2.5