


Категория: Инструкции
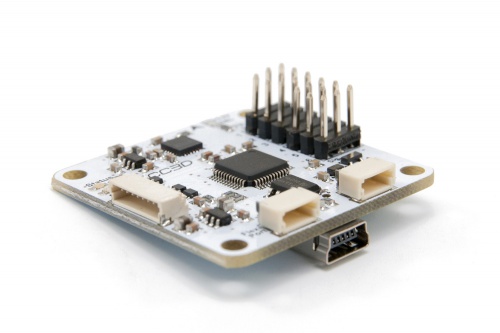
OpenPilot CopterControl3D (CC3D) - 32х-битный полётный контроллер для мультикоптеров. Разработан специально для квадрокоптеров 200/250/300 размера.
Причина может быть в применении неподходящей антивиброплиты. Контролер должен стоять на нейлоновых стойках или на двустороннем скотче. То есть контролер должен крепко сидеть на раме.
Как изменить направление вращение моторов в CC3D? [править ]В настройках контроллера - никак. Направление вращения изменяется переключением любых двух из трёх проводов между мотором и регулятором. Направление вращения (какие провода к каким подключать) лучше узнать заранее, т.к. вместо разъёмов рекомендуется пайка напрямую к регуляторам.
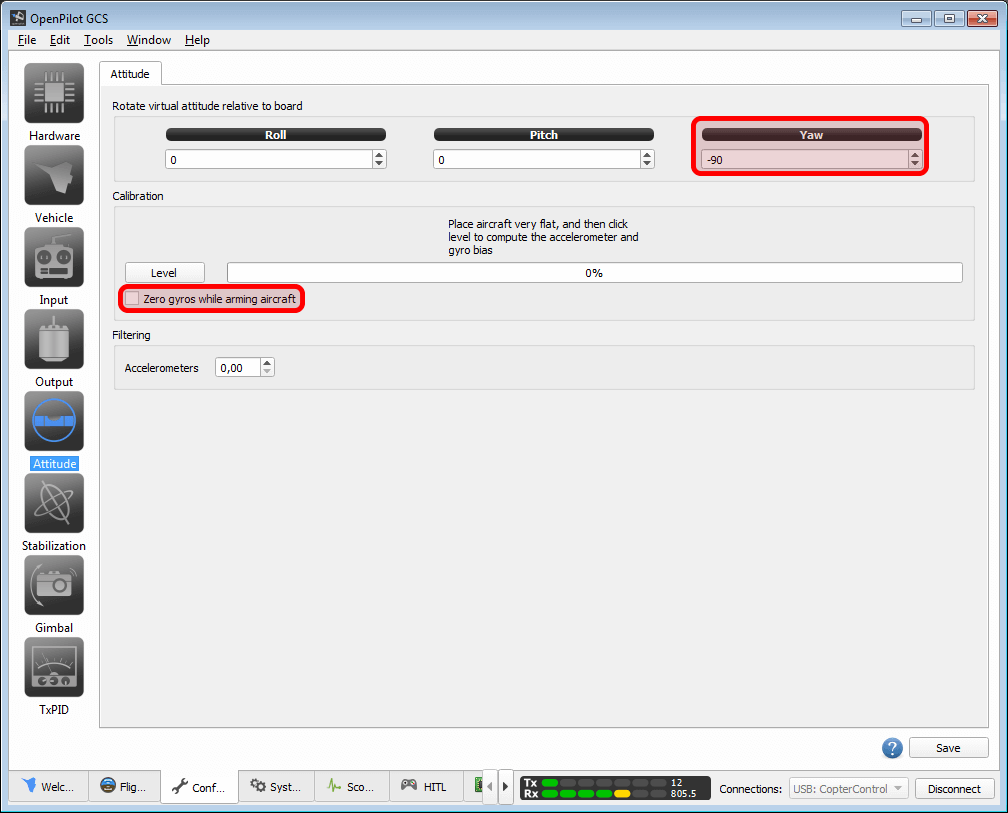
При установки на коптер не хватает места [править ]Это распространенная проблема, но есть решение: к примеру, в программе настройки развернуть по рудеру на 90° или на -90°.
Есть ли у CC3D функция возврата домой по GPS? [править ]Вообще-то нет. Но есть неофициальные прошивки Harakiri и iNav. которые поддерживают CC3D. они могут работать с модулем GPS и компасом, обеспечивая удержание позиции и автовозврат.
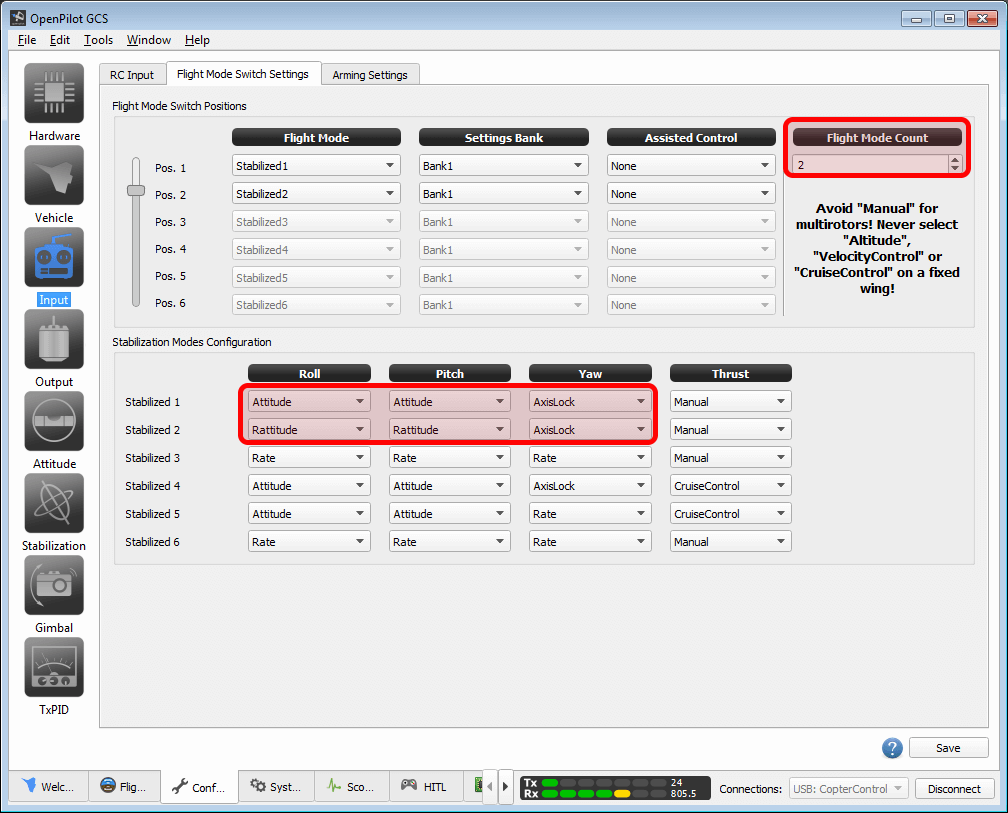
Для чего есть опция Zero gyros while arming aircraft [править ]Опцию Zero gyros while arming aircraft в настройках Attitude настоятельно рекомендуется держать в активном состоянии. Эта опция отвечает за калибровку гироскопа и она может избавить от множества проблем. В OpenPilot (CC3D), в отличии от CleanFlight. при включении питания коптера гироскоп калибруется просто усреднением последних показаний. Поэтому, если после подачи питания не поставить коптер на землю и не подождать пока откалибруются гироскопы, а начать закреплять батарею или вертеть аппарат - гироскопы откалибруются некорректно, и вскоре после взлета весьма вероятно падение. А если опция установлена, то перед армингом будет повторная калибровка гироскопов, и полёт пройдет как нужно, но при этом лучше не пытаться армить коптер в руках.
Как в CC3D сбросить все настройки [править ]По умолчанию при старте визарда предлагается прошивка со сбросом настроек. Чтобы оставить текущие настройки нужно снять галочку на первой страничке визарда.
Как использовать барометр и компас [править ]Бародатчик и магнитометр будет работать с прошивкой CleanFlight. С прошивками OpenPilot и LibrePilot барометр и компас работать не будут.
Советы [править ]Полетный контроллер CC3D — это плата стабилизации, который работает под управлением OpenPilot. CC3D может быть настроена для управления любым аппаратом: от самолета до октокоптера с использованием программы OpenPilot Ground Control Station (GCS) Инструкция по установке
По состоянию на 2016 год, OpenPilot больше не поддерживает плату CC3D, поэтому лучше всего сразу устанавливать прошивку LibrePilot.
Схемы подключений [править ]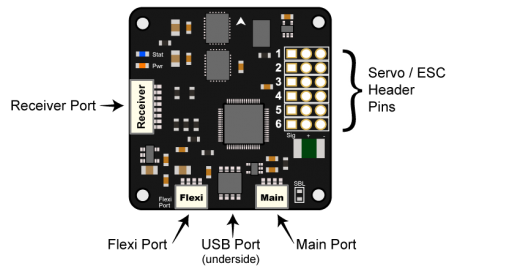
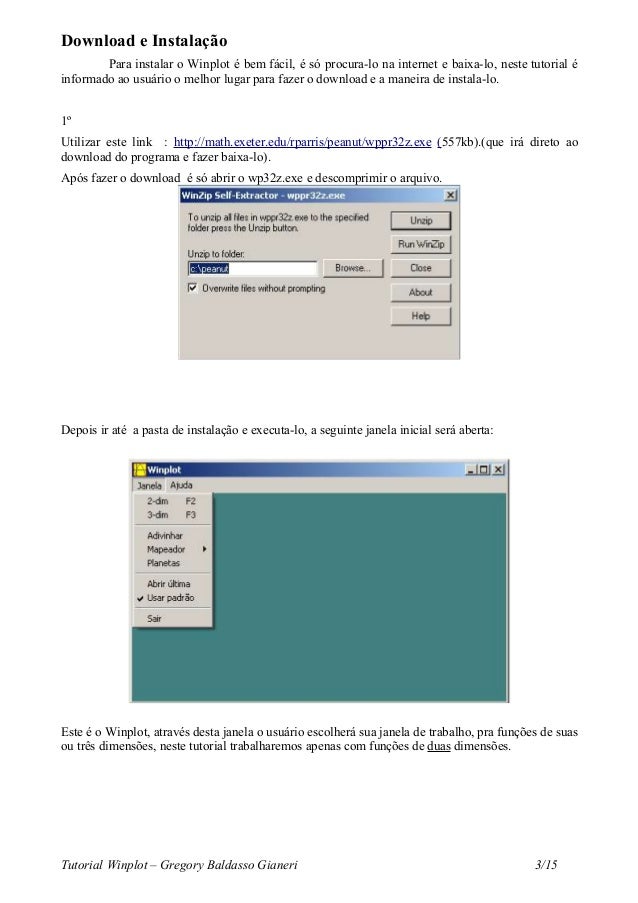
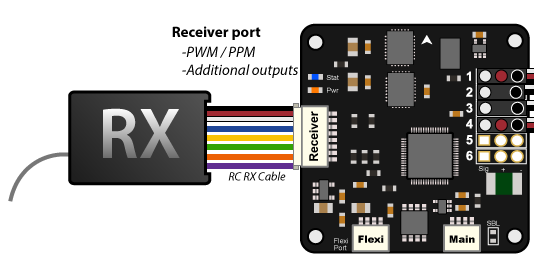
Как подключить все компоненты к плате CC3D:
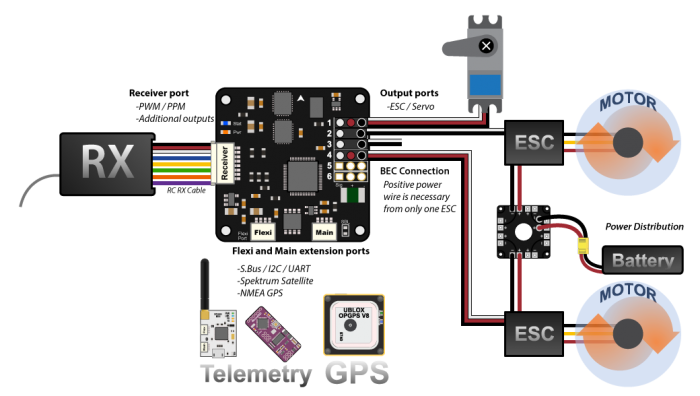
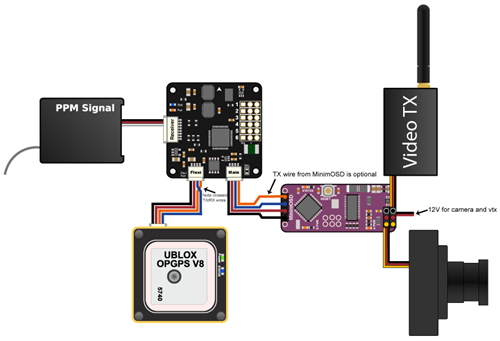
Схема подключения FPV, GPS и OSD.
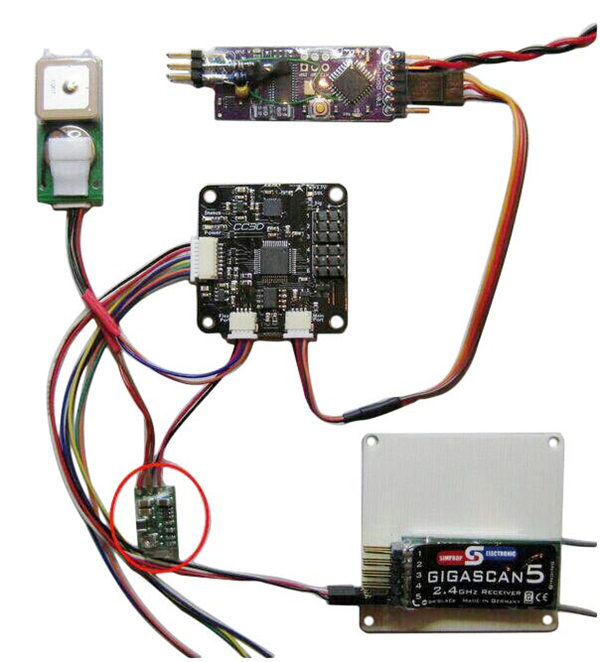
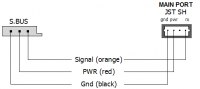
Подключение CC3D к S.BUS.



1 x CC3D Полетный контроллер
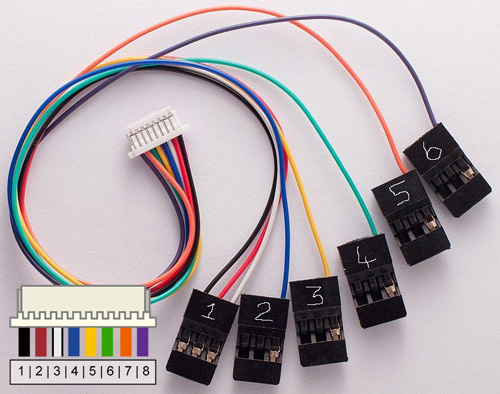
1 x 8P ленточный провод
1 x Коробка для полетного контроллера
Видео [править ] PID -калькулятор для CC3D [править ]Примерный алгоритм настройки:
Есть еще один "быстрый" метод настройки ПИД контроллера с использованием критического положения системы (момент автоколебаний), он же UOV.
На базе этого метода вполне успешно работают автоматические алгоритмы настройки ПИД (пример - Autotune в Cleanflight ).
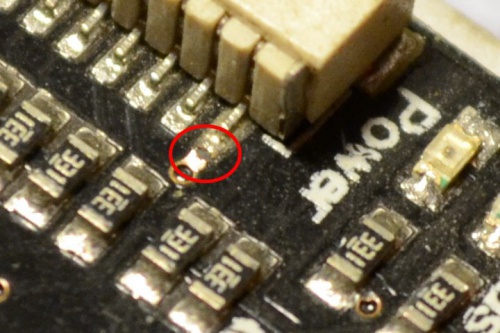
Известные проблемы [править ]Обрыв дорожки на плате. Проявлялось как периодическая потеря сигнала при отлете метров на 20. Перепайка антенны в приемнике, замена в передатчике, переборка проводки в пульте результатов не давали. Оказалось, что причина в обрыве дорожки на плате CC3D, по которой земля идёт на приёмник. В итоге он питался паразитным питанием от индикатора разряда батареи.
















Зарегистрирован: 20 июн 2010, 11:35
Сообщений: 1830
Откуда: flycam.kiev.ua
Благодарил (а): 158 раз.
Поблагодарили: 173 раз.
Они разные эти наши зверьки:
Сережин:
Аппаратура Futaba T8FGS
Приемник FrSky FASST 8 каналов с RSSI
Мозги CC3D
Cyclops OSD 1.5 с датчиком тока 100А (он же раздатка) и GPS
Моторы SunnySky 2212-980 мультиротор версии (крепеж под проп на винтах)
Пропы GWS SF 10x4.7
Регули HK BlueSeries 20A с прошивкой Simon
Батареи Zippy 3S 3000 20C от 1шт. до 3 шт. или 4S 5000-5800 30C
Видеопередатчик от Fatsark 5.8 100mWt
Мой:
Аппаратура Futaba T8FGS
Приемник ORANGE 8 каналов
Мозги LoveFlight Rabbit (compass+baro)
Моторы 2830-860
Пропы APC 1047 SF
Регули HK BlueSeries 50A с прошивкой Simon
Батареи Zippy 3S 3000
Видекамера от системы видеонаблюдения с широким углом
Видеопередатчик 900mHz от BERC
Зарегистрирован: 20 июн 2010, 11:35
Сообщений: 1830
Откуда: flycam.kiev.ua
Благодарил (а): 158 раз.
Поблагодарили: 173 раз.
Наконец можно друг друга поздравить с выходом первой официальной прошивки OpenPilot с поддержкой полетного контроллера OpenPilot Revolution. Новая GCS так же поддерживает работу с CC3D, OPLinkMini и OP OSD, который должен появится в ближайшем будущем!
Англоязычное описание изменений и ссылки на скачивание на официальном сайте проекта.
Ссылка на версию 13.06.02 для Windows
* Сохраните в старой GCS настройки своей платы(.uav файл), они не будут доступны после инсталяции.
* Перед настройкой платы в новой GCS не забудьте обновить boot полетного контроллера.
_________________
Андрей, CEO Flycamstudio
+7(499)403-1231, +38(050)543-4173
Узри силу джедаев!
Зарегистрирован: 20 июн 2010, 11:35
Сообщений: 1830
Откуда: flycam.kiev.ua
Благодарил (а): 158 раз.
Поблагодарили: 173 раз.
Мы пока революцию делаем в комнате, иногда во дворе. Но даже с первых подлетов новая полетка ОР уже очень нравится, даже более! Графический интерфейс с уходом мешающей развитию проекта части разработчиков стал гораздо юзабильнее, настроил через визард в 10 щелчков мышью. Квадр даже без навигации курс например держит как прибитый.
Сегодня к нам в студию посетил с семьей небезизвестный Олег (Os-propo, core team OpenPilot), он только вернулся с сейшона OP, проходящий в Греции. Очень приятно было пообщаться с Олегом, поделиться новостями и опытом.
The Revolution is coming!
_________________
Андрей, CEO Flycamstudio
+7(499)403-1231, +38(050)543-4173
Узри силу джедаев!
CC3D OpenPilot — это не дорогой контроллер полетов для квадрокоптера.
Основным его преимуществом являются дешевизна и малые размеры, а так же — хорошие возможности управления квадрокоптером. Не даром же 90% квадрокоптеров ориентированных на FPV Racing полеты собираются именно на этом контроллере.
Технические характеристики CC3D OpenPilot32-битный микроконтроллер STM32 (128 кБ Flash памяти и 20 кБ оперативной памяти)
3-осевой высокопроизводительный MEMS гироскоп и 3-осевой MEMS акселерометр MPU-6000
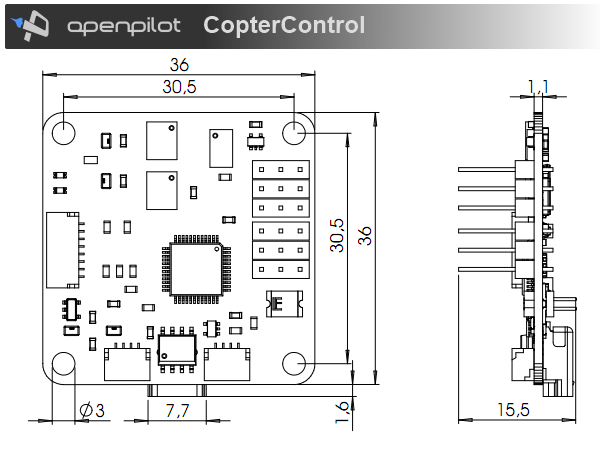
Компактная (36 × 36 мм) 4-слойная печатная плата обеспечивает максимальную защиту от помех и высокую производительность
Поддержка ПО Windows, Mac и Linux для конфигурации контроллера
Поддержка USB и отсутствие необходимости установки драйверов
Поддержка сателитов Spektrum
Поддержка системы Futaba S/BUS
Технология Flexi-port
4 МБ энергонезависимой памяти EEPROM для хранения настроек
Поддержка основных радиовходов: 6 каналов PWM, PPM, Spektrum/JR DSM2, DSMJ, DSMX, приемники Futaba S.Bus
Поддержка нескольких приемников одновременно
Функции ReceiverPort (настраиваемые): 6 входных каналов PWM или PPM, 4 выходных канала PWM
Функции MainPort (настраиваемые): телеметрия (по умолчанию), GPS, S.BUS, сателиты Spektrum/JR
Функции FlexiPort (настраиваемые): телеметрия, GPS, сателиты Spektrum/JR, периферийные устройства I2C (в разработке)
10 выходов PWM для сервоприводов или ESC либо для стабилизации камеры
Стабилизация камеры: поддержка 3-осевых подвесов с поддержкой стабилизации и ручного управления
Дополнительный фильтр, работающий на частоте 500 Гц

Размеры 36х36 мм, вес 5.7 грамма.
Все соединения с приемником и регуляторами оборотов моторов осуществляются через идущие в комплекте кабеля.
Приобретать контроллер без кабелей (такое часто продают на АлиЭкспресе) смысла нет, тк отдельно кабели соединений стоят половина набора.
Как подключить CC3D к квадрокоптеру Как прошить и настроить CC3D OpenPilotПрограмма настройки расположена тут. Так же смотрите официальный сайт. там всегда последняя версия, но он не всегда работает.
Сама настройка очень простая, посмотрите видео ниже, на нем все показано.
Как видите — проблем с настройкой и прошивкой не возникает даже у не опытного пользователя.
Кстати, стоит отдельно сказать про потерю сигнала.
У не дорогой аппаратуры радиоуправления, типа Turnigy 9x, нет режима FallSafe, вместо этого реализован Hold, то есть — при потере сигнала удерживаются последние полученные значения, не мало авиамоделей улетело безвозвратно в небеса потеряв связь — если модель летела ровно, то при потере связи она так и будет лететь дальше, все боле и более удаляясь от владельца.
CC3D OpenPilot при потере сигнала через секунду плавно отключает двигатели даже не смотря на работу Hold на приемнике. При восстановлении связи — работа двигателей восстанавливается.
Это позволит не потерять квадрокоптер улетающим в небеса, а при кратковременной потере сигнала (например залетании за дерево) вы даже не заметите произошедшего.
Как поставить GPS на CC3DНа видео выше - установка и настройка GPS на CC3D. Однако, такая конфигурация будет работать только передавая координаты через OSD.
Для того, что бы работал автовозврат и автопосадка надо установить прошивку Harakiri, она разрабатывалась под Naze32 и Flip32, но и на CC3D тоже работает.
Где купить CC3D OpenPilotНаиболее оптимальным по цене является заказ этого контроллера полета квадрокоптера в китайских интернет магазинах.
OpenPilot – это следующее поколение автопилотов для небольших беспилотных летательных аппаратов (БПЛА, UAV), включая мультироторные аппараты, вертолеты и самолеты. Проект ставит своей целью реализацию лучших возможностей всех ныне существующих подобных систем, разработанных энтузиастами, и сочетает их в едином, простом в использовании программно-аппаратном комплексе. Простота в данном случае ни в коей степени не означает упрощенности и компромиссов. Никаких жестко прописанных констант и настроек, полноценный интерпретируемый язык программирования планов полета, загружаемых с наземной станции, и другие развитые возможности. OpenPilot изначально создавался как мощная платформа для UAV на основе всех типов летательных аппаратов.
В данный момент проект включает в себя несколько базовых продуктов:
OpenPilot Revolution – полный автопилот без ограничений и компромиссов. это 10DOF. модульная и мультисовместимая плата с встроенным UHF модемом и возможностью подключения разных периферийных устройств. Плата базируется на процессоре Cortex-M3 32 bit ARM 72MHz (512 KB Flash, 64 KB RAM) processor. AHRS OpenPilot / INS-современной инерциальной навигационной системы для мониторинга ситуации, ориентации и скорости. Система позволяет использовать её для мультироторных схем от 2 до 12 роторов. (. support for Single Motor Aircraft. )
OpenPilot CC3D – Упрощённый 6DOF одноплатный вариант с урезаным количеством функций, с самовыравниванием и функциями, более чем достаточными для пилотируемого полёта (как и в оригинальном CC).
OpenPilot GCS – станция наземного управления (Ground Control Station) для настройки и управления через встроенный USB, серийный или радиоканал с возможностью параллельного мониторинга полёта.
OpenPilot V8 GPS – OpenPilot GPS v8 сочетает в себе лучшие доступные модификации GPS, с настраиваемой активной антенной и специализированный PCB для лучшего среди возможных GPS решений поддержки БПЛА(UAVs). Специально разработанный для данного проекта, с прошивкой оптимизированной для летательных аппаратов, с учётом потребности в рассчётах быстрых и резких передвижений как горизонтальных так и вертикальных в отличие от стандартных модулей GPS, более ориентированных на наземное использование, например, в автомобилях.
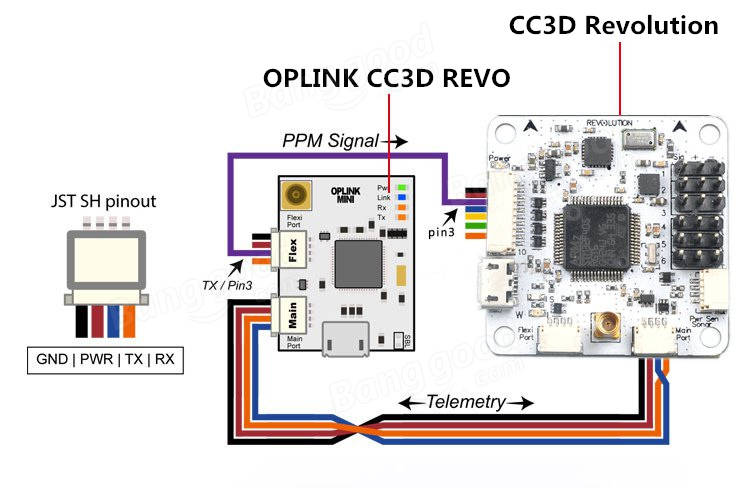
OpenPilot OPLink Mini – радиосистема приёма-передачи телеметрии в режиме реального времени через Ground Control Station, беспроводной настройки и даже Радиоуправления через ваш передатчик по одной линии связи. OpenPilot OPLink Mini является специальным устройством по обмену телеметрической информации и команд с БПЛА, с поддержкой протокола UAVTalk, управляющим потоками данных, с учётом приоритетов передаваемой информации (более высокий приоритет важных данных по сравнению с, допустим, информацией об уровне заряда батареи).
В полной версии встроен в плату OpenPilot Revolution, и имеет те же функции, что и на отдельной плате. Может быть использован для управления с земли как передатчик или GCS, и может быть использован с CC/CC3D. Рабочая частота 433MHz и в будущем 900MHz.
OpenPilot Spectrum Adapter – provides regulated 3.3V from unregulated (up to 15V) ESC/BEC power supplied via Servo headers to the flight controller. (перевод?)
OpenPilot Power Sensor – sспециально разработанный сенсор напряжения, тока и емкости силовой батареи, использующий шунт (R=0.0005 Ом) вместо популярных интегральных датчиков Холла (R=0.150 Ом), что дает точность и практическое отсутствие потерь мощности, наблюдаемое в ряде аналогичных систем с датчиком Холла.
OpenPilot FOSS JTAG – интерфейс для начального программирования и отладки. Используется только разработчиками, так как готовый продукт поставляется с USB загрузчиком.
CC3D Openpilot Open Source Flight Controller 32х битный полетный контроллер для моделей мультикоптеров, малые размеры и вес сделали данную модель популярной среди любителей микрокоптеров, но модель предполагает установку и на другие платформы в том числе самолеты и схемы типа крыло
Особенности Полетного контроллера CC3D:
Технические характеристики Полетного контроллера CC3D:
Комплект Полетного контроллера CC3D:
Видео по настройке полетного контроллера CC3D с помощью программы LibrePilot
Настройка CC3D
Первое подключение батареи — процесс достаточно ответственный. Если где-то накосячили с проводкой, можно что-нибудь сжечь. Поэтому очень рекомендуется при первом подключении использовать 12-вольтовую автомобильную лампочку. Она подключается последовательно в цепь между батареей и квадрокоптером и служит, как предохранителем, так и индикатором: если она не горит — всё в порядке, если горят ярко — где-то замыкание, но никакие детали не сгорят .
Также очень желательно при подключенной батарее проверить мультиметром раму и лучи. Как я уже писал выше, часто бывает так, что болтик, которым крепится мотор, повреждает изоляцию и замыкает питание одного или нескольких моторов на раму. Последствия бывают самые разные: у кого-то сразу идёт дым из мотора, а у кого-то квадрокоптер летает, но не очень адекватен в управлении.
Теперь непосредственно настройка CC3D. Она хорошо показана у Юлиана. здесь или здесь. так что я не буду подробно её расписывать, остановлюсь лишь на некоторых моментах.
Программу LibrePilot можно скачать здесь или зеркало на яндекс диск. Проект OpenPilot более не поддерживается.
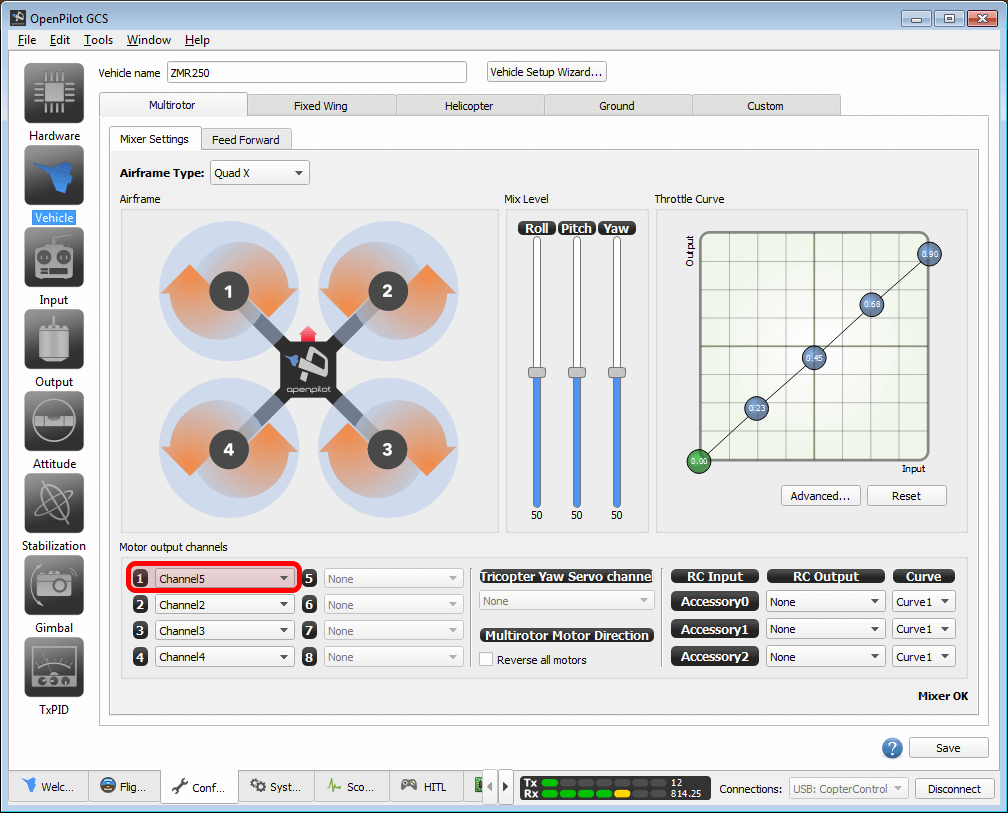
При прохождении «Мастера настройки» я застопорился на калибровке регуляторов. Дальнейшее копание показало, что во время пайки я немного перегрел плату ПК и у неё отошёл сигнальный контакт регулятора первого мотора. Неприятность, но не проблема: я переназначил первый мотор на пятый канал. Пришлось полностью разобрать квадрокоптер и заново припаять провода к ПК. Тогда же я развернул ПК на 90 градусов.
«Мастера настройки» мне теперь было не пройти (на этапе калибровки регуляторов он «искал» первый регулятор на первом канале), так что пришлось всё настраивать вручную.
PID и кривую газа я оставил дефолтными. Это очень индивидуальные параметры: PID учитывают массу, развесовку и технические параметры модели, а кривая газа — личные предпочтения пилота. Настраивать их надо непосредственно под себя. С кривой газа есть такой нюанс, что в любом случае, точка максимального газа (самая правая) должна стоять на 90% (так она и стоит в настройках по умолчанию). Дело в том, что по факту все моторы и все регуляторы на квадрокоптере чуть-чуть разные и при идентичном напряжении выдают немного разное количество оборотов. ПК нивелирует это, где-то чуть повышая обороты, где-то чуть понижая их. Если поставить точку максимального газа на 100%, при полном газе повышать обороты будет некуда и квадрокоптер может уводить в какую-либо сторону. Если же установить эту точно на 90%, «пространство для манёвра» будет всегда.
На этом я завершаю первую часть этой статьи. Квадрокоптер собран и он летает, но надо понимать, что он изначально расчитывался под FPV, а так как этого оборудования пока не установлено, в нынешнем состоянии развесовка квадрокоптера далека от идеальной. Собственно, во второй части я расскажу об установке FPV и только после этого можно будет затронуть тему настройки PID. Кстати, вес квадрокопрера составил около 360 грамм без батареи.
Вот сервисная прошивка для восстановления bootloader cc3d
ИнформацияВсе представленные на данном сайте материалы взяты из открытых источников сети интернет и принадлежат их авторам.
Эксклюзивные материалы написанные специально для сайта 4vo.ru ( проект RC Воздух) охраняются авторскими правами и их копирование без разрешения авторов запрещается.
Администрация 4vo.ru ( проект RC Воздух) не несет ответственности за размещенные на сайте публикации и сообщения.
CopyRight 2015 RC Воздух 4vo.ru